PIC-Prozessoren -
Einleitung
zurück zu PIC-Prozessoren , Elektronik , Homepage
Was
ist denn überhaupt ein PIC
Warum sollte man
PIC-Processoren benutzen?
Was sind besondere Stärken der
PIC-Prozessoren?
Was sind Schwächen der
PIC-Prozessoren?
Welcher PIC-Prozessor ist der
richtige?
Was braucht ein PIC zum
arbeiten an Peripherie?
Wo gibt es PIC-Prozessoren und
Keramikresonatoren?
Sind PIC-Prozessoren
empfindliche Bauelemente?
Wie schreibt man Programme für PICs?
Was leistet die kostenlose
Entwicklungsumgebung MPLAB?
Gibt es Programmiersprachen
für PICs?
Wie kommen denn nun die
fertigen Programme in den PIC?
Welche Probleme kann man
mit einem PIC lösen?
weiter: Ja. Ich will mein
Glück mit PICs versuchen!
zurück
Was
ist
denn überhaupt ein PIC?
Ein PIC ist ein Vertreter der Ein-Chip-Mikrocontroller. Während sich
ein kompletter "Rechner" mit "normalem" Mikroprozessor immer aus
mehreren Chips (IC) zusammensetzt, hat man bei den
Ein-Chip-Mikrocontrollern alles in einen Chip integriert. Darunter
leidet natürlich die Gesamtleistung des Systems, aber die
Ein-Chip-Mikrocontroller sollen keine Wetterprognosen machen, und
sie sind auch nicht für den Aufbau von Personalcomputern gedacht.
Ein-Chip-Mikrocontroller werden benutzt, um kleine
Steuerungsprobleme zu lösen, die mit analogen oder diskreten
digitalen Schaltungen einen hohen Aufwand erfordern würden.
Um die herkömmliche Konkurrenz (analog oder diskret aufgebaut) aus
dem Rennen zu werfen, müssen sie klein, billig und einfach zu
handhaben sein. Damit sind sie auch eine interessante Alternative
für den Elektronikbastler. Der muss weniger Aufwand in den Entwurf
und den Bau von Stromkreisen stecken. Der eingesparte Grips wird in
die Entwicklung eines Steuerprogramms gesteckt.
Warum
sollte
man
ausgerechnet PIC-Prozessoren benutzen?
Es gibt keinen speziellen Grund PIC-Prozessoren (also
Mikrocontroller der Firma Microchip) zu bevorzugen. Sicherlich
eignen sich auch andere Ein-Chip-Mikroprocontrollerfamilien zum
Lösen vieler Probleme der Hobbyelektroniker. Jeder sollte sich aber
für eine einzige Prozessorfamilie entscheiden und mit dieser dann
alle anstehenden Probleme lösen. Es ist uneffektiv, von Projekt zu
Projekt auf ein anderes Pferd zu setzen, nur weil der andere Chip in
diesem Fall einen kleinen Vorteil bietet. Der Arbeitsaufwand, um
sich in ein neues Prozessordesign und eine andere
Entwicklungsumgebung einzuarbeiten, steht normalerweise in keinem
Verhältnis zum zu erwartenden Nutzen.
Ich kam durch Zufall zu PICs, nutze ihre Stärken und lebe mit ihren
Schwächen, ohne mich nun noch groß um andere Prozessoren zu kümmern.
Was
sind besondere Stärken der PIC-Prozessoren?
Fangen wir mal beim lieben Geld an. Was braucht man zum Einstieg in
die Welt der Ein-Chip-Microcontroller?
1 - Eine Software-Entwicklungsumgebung, zum Erstellen der
Programme (mit Assembler oder C-Compiler).
2 - Ein Programmiergerät, um die geschriebenen Programme in den
Prozessor zu übertragen.
3 - Die Microcontroller selbst.
4 - Unterstützung im WWW.
Beim PIC-Hersteller Microchip gibt es die Entwicklungsumgebung (MPLAB) inclusive Assembler kostenlos zum Download. (Für die
leistungsstärkeren PIC-Familien gibt es dort sogar C-Compiler. )
Bauanleitungen für preiswerte Programmiergeräte (5,- ..20,- €)
sind inklusive Software im WWW kostenlos verfügbar. Z.B. auf meiner Homepage .
Die für Hobbybastler geeignetsten
PIC-Prozessoren kosten pro Stück 2,-€ bis 10,-€.
Wer mal in eine WWW-Suchmaschine PIC eintippt, wird schnell
fündig. PICs sind sehr verbreitet, was sie nicht zuletzt ihrem
früheren Einsatz auf Sat-Decoder-Piraten-Karten zu verdanken
haben.
Man investiert also weit unter 50,-€ für den Einstieg, und auch
die Folgekosten halten sich in Grenzen.
Was sind Schwächen der
PIC-Prozessoren?
Aus meiner Sicht ist die Interruptverwaltung
der einfachen PIC-Familien (PIC10F/PIC12F/PIC16F) eine
Schwäche. Mit Z-80-Prozessoren
aufgewachsen, bin ich es gewohnt, jeder Interruptquelle einen
eigenen Interruptvektor zuzuordnen. Die PIC-Prozessoren
unterstützen zwar viele Interruptquellen, haben aber nur einen
Interruptvector. Das ist umständlich, wenn man in einem Programm
mit mehreren Interruptquellen arbeitet. Die einzige
Interruptbehandlungsroutine muss erst in Statusregistern
nachschauen, welche Quelle den Interrupt ausgelöst hat, um dann
die richtigen Programmschritte auszuführen.
Umfangreiche Berechnungen sind auch nicht gerade eine
Lieblingsdisziplin der kleinen PICs. Sie rechnen nur mit
8-Bit-Zahlen, und beherrschen nur Addition und Subtraktion. Es
lassen sich zwar mit Softwareroutinen
auch große Fließkommaberechnungen anstellen, aber das ist
umständlich, langsam und macht keinen Spaß. Außerdem
verbraucht z.B. eine 64-Bit Rechenroutine viele der knappen
Register des PIC.
Um nicht ungerecht zu sein: es gibt PIC-Prozessoren der PIC18Fxxx-Serie, die nicht nur schneller
getaktet werden können, sondern vor allem auch die Multiplikation
in Hardware beherrschen. Auch die Interruptverwaltung ist bei den
PIC18F... besser.
Auch die "großen" PIC24Fxxx,
PIC24Hxxx, dsPIC30Fxxx
und dsPIC33Fxxx spielen
in
einer ganz anderen Liga, sie sind aber noch nicht das typische
Spielzeug der Hobbybastler. Diese Controller verarbeiten Daten in
16-Bit-Breite und die dsPICs haben eine zusätzliche Recheneinheit
für digitale Signalverarbeitung.
Welcher PIC-Prozessor ist
der richtige?
 |
Flash !!
Für den Hobbyelektroniker kommen eigentlich nur PIC-Typen
mit Flash-Speicher in Frage, man erkennt sie am "F" in der
Mitte der Typenbezeichnung. Nur diese Typen sind flashbar,
d.h. man kann sie nahezu beliebig oft umprogrammieren.
Andere Typen (mit einem 'C' anstelle des 'F' in der
Typenbezeichnung) sind nicht zu empfehlen, da sie entweder
nur einmal programmiert werden können (OTP), oder
umständlich wie EPROMS mit UV-Licht gelöscht werden. Die
UV-löschbaren PICs sind obendrein recht teuer.
Ich beschäftige mich ausschließlich mit flashbaren PICs,
also mit PICs der Serien
PIC16F.../PIC12F.../PIC18F.../PIC10F.../PIC24.../dsPIC30F.../dsPIC33F...
Gehäuse
Die kleinsten PICs haben nur 6 Pins, die größten haben
derer 100. Für Bastler eignen sich vor allem Typen im
DIL-Gehäuse mit 8, 14, 18, 28 und 40 Pins. Mit ihnen
lassen sich einfache Platinenlayouts realisieren.
Familien
Zwei PIC-Familien eignen sich besonders für Bastler.
- Die etwas älteren 14-Bit-Kern-PICs
haben Bezeichnungen, die meist mit "PIC16F..." beginnen.
Im Web findet man jede Menge fertiger Schaltungen mit
diesen Typen, und der Buchhandel bietet auch geeignetete
Literatur (wenn auch nicht auf dem aktuellen technischen
Stand). Sie sollten vorzugsweise in Assembler
programmiert werden, was an den Anfänger recht hohe
Forderungen stellt.
- Die moderneren 16-Bit-Kern-Typen
heißen "PIC18F...". Sie sind rundweg besser ausgestattet
und können problemlos in C programmiert werden, da sie
viel Programmspeicher haben und ein C-Compiler für
nichtkommerzielle Zwecke frei verfügbar ist. Es mangelt
aber noch an fertigen Anwendungen im Web sowie an
geeigneter Literatur. Sie sind auch etwas teurer.
|
Vorschläge
Um in der Typenvielfalt den Überblick nicht zu verlieren, sollte man
sich zum Anfang auf einige wenige PIC-Typen beschränken. Im
Folgenden stelle ich einige typische Universal-PICs vor, die auch
den Vorteil haben, bei den Bastler-Online-Shops
von Reichelt und Conrad (teurer) gelistet zu sein:
Eine umfassendere Auflistung
interessanter Typen befindet sich hier .
Im Web und in der Literatur stößt man immer wieder auf den PIC16F84. Das war der erste echte
Flash-PIC, und er wurde deshalb mit Begeisterung aufgenommen.
Heute ist er veraltet und wird bei den Händlern zu
Apothekenpreisen angeboten. Wer mit PICs heute anfängt, sollte
einen preiswerteren, leistungsstärkeren Nachfolgetyp wie den PIC16F628A verwenden. Viele
PIC16F84-Anwendungen lassen sich mit geringem Aufwand an modernere
PICs anpassen.
Nun noch mal einige PICs im Detail:
PIC 16F84 (A)
Der 16F84 ist mit 18-pins (DIL-Gehäuse) recht klein. Er verfügt
über
Dieser Chip ist mit einer Taktfrequenz von bis zu 10 MHz verfügbar
(als modernisierter PIC16F84A auch bis 20 MHz).
Der 16F84 eignet sich für alle einfachen Anwendungen, bei denen
keine analogen Werte gemessen werden müssen. Er kann Impulse
ausmessen und erzeugen, kleine Tastaturen
abfragen, LCD-Displays
ansteuern, und auch wenn er keine Hardware für die serielle
Kommunikation besitzt, so kann man doch eine serielle
Schnittstelle durch ein wenig Software realisieren. (siehe hier )
Der PIC18F84 war der erste PIC mit richtigem
Flash-Programmspeicher, womit er der ideale Bastler-PIC wurde.
Dementsprechend wuchs seine Polularität. Im Web finden sich viele
Anwendungen für den 16F84, der aber nun im PIC16F628
und im PIC16F818/819 seine Meister
und würdige Nachfolger gefunden hat. Die neueren Typen sind nicht
nur leistungsstärker, sondern oft auch billiger. Wer eine
Schaltung mit dem 16F84(A) einfach nachbauen will, ohne sich mit
den Internas von Hard- und Software zu beschäftigen, der kann
diesen Typ verwenden. Wer sich aber mit PICs intensiver
beschäftigen möchte, sollte um diesen Großvater lieber einen Bogen
machen.
PIC 16F87x (A) / PIC16F88x
Seit 2000 gibt es „größere“ flashbare PICs, die 16F87x-Familie.
Mein Standardtyp ist der 16F876. Er verfügt über:
Dieser Chip ist mit einer Taktfrequenz von bis zu 20 MHz verfügbar.
Der 16F876 ist mit 28 Pins schon etwas größer als der 16F84. Sein
großer Vorteil sind die analogen
Eingänge zum Messen von Spannungen. Ansonsten hat er von
allem etwas mehr als sein kleiner Bruder: mehr Ein/Ausgänge, mehr
Timer mehr Speicher und mehr Geschwindigkeit.
Die integrierte serielle Schnittstelle vereinfacht die
Realisierung einer RS-232-Verbindung
z.B. zu einem PC (verlangt aber einen zusätzlichen invertierenden
Treiberbaustein).
Der größere PIC16F877 hat einen zusätzlichen 8-Bit-Port, und ist
mit seinen 40 Pins eigentlich schon etwas groß.
Als leicht verbesserte Versionen der PIC16F87x brachte Microchip
die PIC16F87xA auf den Markt. Für den Anwender macht es kaum einen
unterschied, ob er den 16F87x oder den 16F87xA verwendet.
Als nächste Version erschien die 16F88x-Familie, die als Ablösung
der 16F87x(A) zu betrachten ist. Sie sind recht kompatiebel zu den
Vorgängern, weisen aber eine Reihe kleiner Verbesserungen auf. Als
Trumpf bringen sie einen nanoWatt-Oszillatorschaltung mit. Die
ermögliche bei vielen Anwendungen den Verzicht auf externe
Taktquellen und hilft Strom zu sparen.
Eine etwas abgespeckte Version der PIC16F87x-Familie ist die PIC16F7x-Familie. Ihr fehlt ein EEPROM , mit dem man Daten
dauerhaft speichern kann. Außerdem haben sie sich als etwas
problematisch beim Brennen des
Flash-Speichers erwiesen. Ich empfehle lieber die richtigen
PIC16F87x oder PIC16F88x zu verwenden.
PIC 16F62x
Seit 2001 gibt es die 16F62x-Familie (16F627 und 16F628). Diese
PICs können die 16F84 verdrängen, denn sie haben die gleiche Größe
(18-Pin-Gehäuse) bei einer deutlich verbesserten Ausstattung:
Dieser Chip ist mit einer Taktfrequenz von bis zu 20 MHz verfügbar.
Vor allem die 16-Bit Timer und die serielle Schnittstelle wurden am
16F84 immer vermisst. Bei Reichelt
und Farnel kosten diese PICs sogar weniger als 5 €. Was will
man mehr?
PIC 12F6xx
Seit 2002 gibt es die 12F6xx-Familie (12F629 und 12F675). Diese
PICs sind spottbillig (2 ... 4 €) und haben nur 8 Pins. Sie eignen
sich gut für kleine Steueraufgaben, der 12F675 besitzt sogar einen
ADC:
PIC 16F630/676
Diese Typen sind eigentlich 12F629/675-Schaltkreise, die um 6
I/O-Pins erweitert wurden. Folglich stecken sie in einem
14-Pin-Gehäuse:
PIC 18F4550
Das ist ein Vertreter der leistungsfähigeren 16-Bit-Kern-PICs.
Diese kennen zusätzliche Befehle und eignen sich generell für eine
Programmierung in der Sprache C, was den Entwurf von umfangreicher
Software doch etwas einfacher macht.
Dieser Chip für eine Taktfrequenz von bis zu 48 MHz ausgelegt.
Es gibt auch Prozessoren der Serien PIC24, dsPIC33, dsPIC30Fxx oder PIC32, die aber für Bastelerzwecke
meist überdimensioniert sind. Mit sinkenden Preisen, steigender
Verfügbarkeit bei den Händlern und zunehmendem Unwillen sich mit
Assembler zu quälen, werden aber vor allem die PIC18F-Typen
zunehmend an Popularität gewinnen, und die PIC16F/PIC12F
mittelfristig in die Ecke drängen.
 |
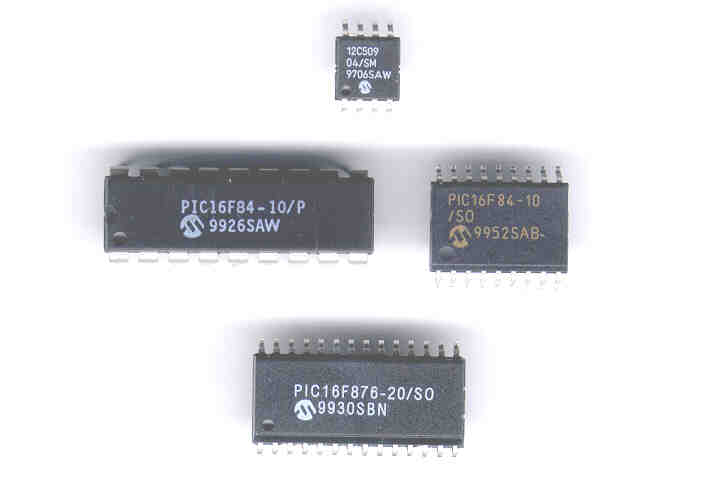
Für Leute mit kleinen Fingern
oder mit wenig Platz auf der Platine gibt es die PICs
natürlich auch als SMD. Auf nebenstehendem Bild sind von
oben nach unten zu sehen:
- PIC12C509-04/SM (nicht
flash-bar)
- PIC16F84-10/P und
.../SO
- PIC16F876-20/SO
Der direkte Vergleich zwischen
der DIL und der SMD-Bauform des 16F84 zeigt, dass der
SMD-Typ nur die halbe Breite hat. Noch eindrucksvoller
würde ein Vergleich zwischen den unterschiedlichen
Gehäusebauformen des PIC16F876 ausfallen.
Die SMD-Typen haben
allerdings zwei Nachteile
- das Leiterplattenlayout
ist schwieriger
- das Brennen (laden des
Programms in den PIC) geht nur über die ICSP -Schnittstelle, es
gibt keine bezahlbaren Brenner (Programmiergeräte) mit
SMD-Fassungen.
Für die ersten Schritte
empfehle ich deshalb PICs im großen DIL-Gehäuse.
|
Was braucht ein PIC zum
arbeiten an Peripherie?
| Eigentlich nur eine Betriebsspannung von ca.
5 V und einen Takt. Viele
moderne PICs können den Takt auch intern erzeugen.
Die Betriebsspannung ist je nach Typ in Toleranzen
variierbar. Der Bereich von 4 V bis 5,5 V ist unkritisch.
Bei einigen Typen kann man die Spannung bis auf 2 V
absenken, ohne den sicheren Arbeitsbereich zu verlassen.
Die Stromaufnahme des Prozessorkerns ist vom Takt
abhängig, überschreitet aber beim maximalen Takt nie 15
mA. Dazu kommt noch der Strom, den der PIC aufwenden muss,
um über digitale Ausgänge andere Bauteile anzusteuern.
Wenn man z.B. mit dem PIC 8-Leuchtdioden
ansteuert, werden dafür natürlich auch einige 10 mA
zusätzlich benötigt. Die Ausgangspins eines
PIC können übrigens bis zu 20 mA liefern, weswegen
zusätzliche Treiber oft nicht nötig sind.
Nebenstehendes Bild zeigt eine typische Grundbeschaltung
für einen PIC16F84. Die mit 'Port A' und 'Port B'
beschrifteten Boxen sind lediglich Steckverbinder zu den
zu steuernden oder zu überwachenden Schaltungen. Der
5V-Steckverbinder liefert die Betriebsspannung, und der
blaue 'CST...' ist ein Keramischer Schwinger, der den Takt
für den PIC bereitstellt. Eigentlich ganz einfach.
|
 |
 |
Als Taktquellen haben sich keramische Schwinger mit
integrierten Kondensatoren (Keramikresonator) bestens
bewährt. Die kosten nur 1,- €, sind kleiner als ein Quarz
und werden ohne zusätzliche Bauelemente einfach an den PIC
angeschlossen. Ihr Frequenzfehler liegt bei 0,5 %.
Wer es penibel genau mag, der nimmt einen Quarzoszillator
oder einen Quarz. Der Quarz benötigt aber noch zusätzlich
2 Kondensatoren und evtl. einen Widerstand.
Keramikresonatoren für mehr als 12 MHz sind schwer zu
finden. Wer die 20 MHz der schnellen PICs nutzen will,
wird deshalb eher Quarze und Quarzoszillatoren
verwenden.
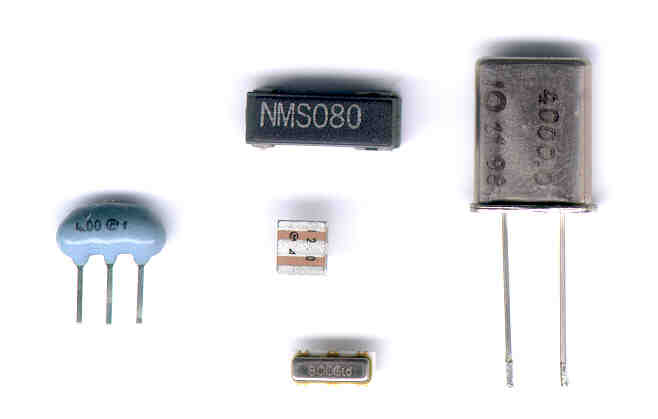
Das nebenstehende Bild zeigt von links nach rechts:
- Quarzoszillator
- Quarz (HC18-Gehäuse)
- Keramikresonator (blaues CST-Gehäuse) (Schwinger mit
integrierten Kondensatoren)
|
Wer gern mit SMD-Bauteilen arbeitet, findet auch Quarze
und Schwinger im Kleinformat. Im nebenstehenden Bild sieht
man zwischen den beiden Normalbauformen (links:
Keramikresonator, rechts: Quarz) von oben nach unten:
- SMD-Quarz
- Keramikresonator
- Keramikresonator
|
 |
Wo gibt es
PIC-Prozessoren und Keramikresonatoren ?
PICs sind recht populär. So kann man PICs z.B. bei Conrad bestellen. Dort gibt es auch
Keramikschwinger bis 10 MHz.
Andere Anbieter sind z.B. Farnell,
Memec oder Elpro .
Wer eine schnelle Lieferung zu recht günstigen Preisen möchte,
sollte bevorzugt bei Reichelt
bestellen.
Auch bei Keramikresonatoren über 10 MHz sollte man mal bei Reichelt oder RS und nicht bei Conrad
nachschauen. Wer nur 4-MHz- oder 8-MHz-Keramikresonatoren braucht,
findet diese im Conrad-Katalog bei den Quarzoszillatoren und bei
den Keramikresonatoren unter der Bezeichnung "Schwinger mit
integrierten Kondensatoren". (Conrad Bestellnummern: 4MHz: 50 31
69-xx; 8MHz: 50 39 67-xx
Bei Pollin gibt es für
ein Butterbrot 20-MHz-Quarzoszillatoren. Die sind besonders
deswegen interessant, da 20 MHz-Keramikresonatoren kaum erhältlich
sind.
Sind PIC-Prozessoren
empfindliche Bauelemente?
|
Ich habe bisher nur zwei Mal einen PIC zerstört, und ich
kenne jemanden der an einem PIC eine Ausgangsleitung
getötet hat. Kurz und gut, die Dinger sind sehr
robust. Trotzdem sollte man natürlich die üblichen
Regeln für den Umgang mit Halbleitern beachten. Denn
garantiert wird nur die Funktion im zuglassenen
Arbeitsbereich und bei korrekter Handhabung.
Viele Leute glauben immer noch, dass man
MOS-Schaltkreise (wie z.B. PICs) schon durch bloßes
Berühren der Pins zerstören kann. Theoretisch stimmt das
zwar, doch kommt es in der Bastlerpraxis kaum vor. Alle
Pins sind durch Schutzdioden gegen Überspannung (also auch
statische Ladungen) geschützt. Ich persönlich behandle
inzwischen PICs nicht anders als nicht-MOS-Schaltkreise,
und ich hatte trotzdem noch nie Probleme durch
elektrostatische Ladungen.
Da man einen PIC, bis alles funktioniert, häufig aus
seiner Fassung nimmt und wieder hineinsteckt, besteht die
größte Gefahr für den PIC darin, dass man seine Pins
verbiegt und danach wieder ausrichten muss. Das geht
höchsten 3 mal gut, danach bricht der Pin einfach ab .
Deshalb benutze ich stets ein IC-Ausziehwerkzeug (Bild
rechts), um ihn aus der Fassung zu entfernen, auch wenn
das etwas dekadent anmuten mag.
Ebenfalls durch das häufige Ein- und Ausstecken und die
damit verbundene Routine besteht ständig die Gefahr, den
Schaltkreis versehentlich falsch herum in den Sockel zu
stecken. Das quittiert der PIC dann mit starker Erwärmung
die innerhalb einiger Sekunden zum Tode führt. (Auf diese
Art und Weise habe ich zwei PICs verloren.) Ich
kennzeichne deshalb auf den Leiterplatten die Position von
Pin 1 zusätzlich mit einer auffälligen, schwarzen
Markierung. Auch markiere ich gern Pin1 der PICs mit einem
Tropfen Tip-Ex auf dem Chip, auch wenn das unprofessionell
aussieht.
Manuel Krüger gab mir den Tip, in der Entwicklungsphase,
wenn ein PIC oft gebrannt wird, den PIC nicht einzeln zu
benutzen, sondern ihn in einen Präzisionssockel zu
stecken, und dieses Doppelpack dann wechselseitig in den
Brenner bzw. in die Testschaltung zu stecken. Falls dann
was verbiegt, ist nur der Sockel Schrott.
|
 |
Nachtrag:
Ich habe versehentlich einen dritten PIC getötet. Durch einen
Fehler in der Programmiergerätesoftware habe ich ihn
wiederholt mit einer Programmierspannung von über 25V "versorgt".
Maximal zulässig waren nur 13,5V. Ich nehme ihm nicht übel, dass
er das nicht vertragen hat.
Nachtrag 2:
Nach weit über 10 Jahren habe ich nun das erste Mal einen PIC in
meiner Sammlung, der Fehler im Flash-Speicher aufweist. Einige
wenige Bits des Programmspeichers lassen sich nicht brennen. Da
der Chip eigentlich nagelneu ist, ist es wohl ein
Fertigungsfehler, der bei der Endkontrolle durchgeschlüpft ist. In
diesem Zusammenhang will ich noch mal darauf hinweisen, dass bei
mir noch kein einziger PIC - egal wie oft ich ihn programmiert
habe - Ermüdungserscheinungen in den Speicherzellen gezeigt hatte.
Wie schreibt man Programme für PICs?
Man schreibt ein Assembler-
oder C-Programm mit einem Text-Editor,
und lässt das dann vom Assembler oder Compiler in ein HEX-File
umwandeln. Das HEX-File wird dann durch ein Programmiergerät in den PIC
"gebrannt". Das Schreiben, Assemblieren, Compilieren (und wenn man
einen Microchip-Programmiergerät besitzt auch das Brennen) erfolgt
unter Windows mit einem kostenlosen Softwarepaket, das sich
"integrierte Entwicklungsumgebung MPLAB" nennt.
Für die keinen PICs (PIC10F / PIC12F / PIC16F) empfehle ich das
Programmieren in Assembler.
Bei den größeren PICs (PIC18F / PIC24F / PIC24H / dsPIC30F /
dsPIC33) empfehle ich das Programmieren in C.
nach oben
Was
leistet
die kostenlose Entwicklungsumgebung MPLAB?
Mit ihr kann man Programme im
Assemblercode
entwickeln. Da der Befehlssatz des PIC nicht mal 40 Befehle
umfasst, ist das auch gar nicht so schwer.
Ich arbeite überwiegend mit Assembler. Compiler für höhere
Programmiersprachen (von denen aber einige nicht kostenlos sind)
lassen sich im MPLAB problemlos einbinden.
Das Resultat ist dann ein *.HEX-File,
das den fertigen Code enthält. Besitzer eines von Microchip
vertriebenen Programmiergeräts (PICstart, PICkit2, ICD2) können dieses aus
der Entwicklungsumgebung MPLAB heraus direkt ansteuern und das
*.HEX-File in den PIC übertragen.
Besitzer anderer Programmiergeräte
'brennen' das HEX-File mit der zum Programmiergerät gehörenden
Software in den PIC.
Eine mit MPLAB vergleichbare
kostenlose Entwicklungsumgebung für Microcontroller ist mir
ansonstern nur noch für Atmel-Controler bekannt.
Gibt es "richtige"
Programmiersprachen für PICs?
Ja gibt es, und die lassen sich meist als Plug-In in MPLAB
integrieren.
Am interessantesten sind C-Compiler:
- Für die PIC18Fxxx
gibt
es
eine
etwas
eingeschränkte
aber dafür kostenlose Schüler-Version von Microchips C18-Compiler.
- Für die dsPIC30Fxxx
/ dsPIC33xxx / PIC24xxx gibt es
eine etwas eingeschränkte aber dafür kostenlose Schüler-Version
von Microchips C30-Compiler
- Vom C-Compiler CC5X gibt es eine Version, die für
nichtkomerzielle Zwecke kostenlos benutzt werden kann. Ein dazu
passender Programmierkurs
befindet sich hier.
- Es gibt auch andere C-Compiler (z.B. HiSoft), die kosten aber
etwas Geld.
Eine interessante Alternative für Bastler ohne Programmiererfahrung
scheint Parsic zu sein. Das
ist ein grafisches Tool, mit dem man sich sein PIC-Programm
sozusagen zusammenklicken kann. Für einfache Programme kann das
interessant sein. Das kostenlose Demo kann leider nicht speichern,
und die Vollversion kostet leider 100 €. Zum Ausprobieren zu teuer,
für professionellen Einsatz zu beschränkt, es sei denn man
importiert Programmteile aus anderen Entwicklungsumgebungen. Der
Ansatz ist aber lobenswert.
Unter dem Namen JAL gibt
es eine Art 'Hochsprache' für PICs die etwas an Pascal erinnert.
Von Microchip selbst gibt es 'Maestro', mit dem sich Programme
aus 'Bausteinen' zusammenbasteln lassen.
Ich programmiere PICs fast ausschließlich in Assembler und
nur wenig in C. Stellt mir bitte keine
Fragen bei Problemen mit anderen Programmiersprachen.
Alle höheren Programmiersprachen ist ein Problem gemeinsam: im
Vergleich mit Assembler produzieren sie einen extrem uneffizienten
Code. Schon kurze Pascal-Programme füllen den kleinen
Programmspeicher eines PIC16Fxxx. Deshalb ist der Einsatz von
Hochsprachen meiner Meinung nach nur bei PIC18Fxxx
und größeren PICs angebracht.
Von den Problemen der Hardware-Initialisierung kann man sich mit
Hochspachen auch nicht restlos freikaufen, aber in C programmiert
man viel schneller als in Assembler.
Wie kommen denn nun die
fertigen Programme in den PIC?
Das machen Programmiergeräte,
sogenannte "Brenner" . Das sind kleine Kästen oder Platinen,
die in der Regel an die USB-Schnittstelle des PC angeschlossen
werden. Der Brenner hat eine Schaltkreisfassung, in die der PIC
gesteckt wird oder einen Steckverbinder, an den der PIC über ein
Kabel und einen Adapter angeschlossen wird.
Der Eigenbau solch eines Brenners lohnt sich heutzutage nicht mehr,
es gibt eine ganze Reiche industriell hergestellter Geräte
unterschiedlicher Preisklassen.
Wer ca. 230,- € zu viel hat kann bei Conrad den "PICstart Plus" von
Microchip kaufen (bei Reichelt ca.
260,-€ ). Dieses industrielle Gerät wird auch direkt von der
Entwicklungsumgebung MPLAB unterstützt. Der PICStart kann alle am
Markt verfügbaren PIC-Typen "brennen".
Für ca. 50,- € gibt es von Microchip das PICkit1. Das ist eine
kombinierte Brenn- und Experimentier-Platine für 8- und 14-beinige
Flash-PICs.
Sehr gut gefallen mir die neuen minimalistuischen Brenner BFMP
, PICkit-2 und
PICkit-3 von Microchip mit USB-Anschluss. Da ist man mit
(deutlich) unter 50 Euro dabei, und kann die Brenner direkt aus
der MPLAB-Entwicklungsumgebung heraus ansteuern. Das PICkit-3
eignet sich sogar als Debugger.
Welche Probleme kann man
mit einem PIC lösen?
Große und auch ganz kleine.
Viele Bastler glauben, einen Prozessor zu benutzen, wäre wie mit
Kanonen auf Spatzen zuschießen. Dem ist aber nicht ganz so.
Beispiel für ein kleines Problem
Auf einer Modelleisenbahnanlage sollen die 8
Laternen einer Straßenbeleuchtung vorbildgerecht eingeschaltet
werden. Dazu müssen sie beim Einschalten unabhängig voneinander
unregelmäßig flackern, bis sie schließlich alle gleichmäßig und
hell leuchten.
In konventioneller Bauweise ist der Aufwand erheblich. Benutzt man
aber einen PIC, so verbindet man einfach 8-Pins mit den Lampen
(falls die Leistung der Lampen zu hoch ist benötigt man noch
jeweils einen Treibertransistor), schließt einen Keramikschwinger
an und lädt den PIC mit einem Programm, das das gewünschte
Einschaltverhalten simuliert.
Beispiel für ein mittleres Problem
Ein selbstgebautes elektronisches Gerät
soll über eine serielle Schnittstelle vom PC aus gesteuert
werden.
Man baut in das Gerät einen PIC ein, der die serielle
Schnittstelle enthält und mit seinen digitalen/analogen Leitungen
mit den Steuerfunktionen des Geräts verbunden ist. Der PIC
kommuniziert mit dem PC und steuert dementsprechend das Gerät.
Beispiel für ein originelles Problem
Man hätte gern wieder eine Armbanduhr mit
integriertem wissenschaftlichen Taschenrechner.
Seit 1985 gibt es keine Armbanduhr mit echtem wissenschaftlichem
Taschenrechner mehr, sondern nur noch Rechenkrüppel für die 4
Grundrechenarten. Ein echter Nerd baut sich sowas selbst. (www.calcwatch.com)
Beispiel für ein großes Problem
Ein ferngesteuertes Modellflugzeug soll mit
einem Autopiloten versehen werden, der zusätzlich zur
Funkfernsteuerung das Flugverhalten nach Sensordaten
stabilisiert.
Ein PIC wird in die Leitungen zwischen Fernsteuerempfänger und
Rudermaschinen des Flugzeugs geschaltet. Über weitere Anschlüsse
wird er mit Sensoren für den Luftdruck, die Geschwindigkeit und
die Beschleunigungskräfte versehen. Er misst die Länge der vom
Boden gesendeten Fernsteuerimpulse und verändert sie nach
ausgefeilten Regelgesetzen in Abhängigkeit von den Sensordaten.
Die veränderten Impulse steuern die Rudermaschinen des Flugzeugs
und damit das Flugzeug selbst.
All diese Beispiele sind keine Ausgeburt der Phantasie, sondern
real existierende Anwendungen für PICs.
weiter: Ja. Ich will mein
Glück mit PICs versuchen!
zurück zu PIC-Prozessoren , Elektronik , Homepage
Autor: sprut
erstellt: 2000
letzte Änderung: 30.12.2018