Einleitung
Test
Funktionsprinzip
Eigentümlichkeiten
Überlegungen zum Bau
Signalpegel-Linearisierung
Projektstatus
Downloads
zurück zu Projekte
zurück zu HF

Einleitung Test Funktionsprinzip Eigentümlichkeiten Überlegungen zum Bau Signalpegel-Linearisierung Projektstatus Downloads zurück zu Projekte |
|
| Der Synthesizer (ADF4351) erzeugt das
HF-Signal mit 35 MHz ... 4,4 GHz. Mit dem Abschwächer
(PE43702) wird die gewünschte Ausgangsleistung eingestellt
und mit dem Endverstärker das Signal um ca. 20 dB verstärkt.
Die Steuerplatine (PIC18F4550) steuert alle Baugruppen. Die
Bedienung erfolgt über Tastatur, Rotary-Encoder und
Dotmatrix-Display. Das nebenstehende Foto zeigt die Anordnung der drei Evaluation Boards auf dem Boden des Gehäuses. Die Frontseite ist hier rechts und die Rückseite links. Rechts befindet sich die schwarze ADF4351-Platine. Ihr Frequenzeingang ist mit einer gelben Schutzkappe versehen, da der interne 25-MHz-Quarz benutzt wird. Einer der beiden Ausgänge ist mit einem Dummy-Load abgeschlossen, der andere ist mit Hilfe eines Koaxialkabels mit dem Eingang (oben) der grünen PE43702-Platine verbunden. Der Ausgang (unten) der PE43702-Platine ist mit Hilfe eines SMA-Winkeladapters mit dem Eingang des 20dB-Verstärkers verbunden. Am Ausgang des Verstärkers ist ein kurzes Koaxialkabel angeschlossen, das normalerweise zur (hier entfernten) Frontplatte geht. Am oberen Bildrand kann man die senkrecht stehende Steuerplatine erahnen. Über ein buntes Flachbandkabel ist der ADF4351 angeschlossen. Eine pinkfarbene Litze dieses Kabels geht zum 5V-Eingang der Platine. (Die dort ursprünglich vorhandene Buchse wurde entfernt. Die Steuerleitungen des PE43702 sind grün. Die 5V-Versorgungsspannung für den PE43702 und den Verstärker sind das schwarz/orange Leitungspaar. |
 |
| Für dieses Bild wurde die Frontplatte des
Gehäuses abgenommen und so zur Seite gedreht, dass man ihre
Rückseite erkennen kann. Oben in grün ist das LCD-Display zu sehen. Es ist mit buntem Flachbandkabel an der Steuerplatine angeschlossen. Der blaue Trimmwiderstand dient behelfsmäßig der Einstellung des Display-Kontrasts. Darunter ist in braun die Tastatur zu sehen., die ebenfalls mit buntem Flachbandkabel an der Steuerplatine angeschlossen ist. Außerdem kann man vier Shottky-Dioden erkennen. Sie dienen der Erzeugung eines Interrupt-Signals bei einem beliebigen Tastendruck. Die Lochrasterplatine links daneben trägt den Rotary-Encoder und dessen Beschaltung (4 Widerstände und 2 Kondensatoren). |
 |

 |
 |
 |
 |
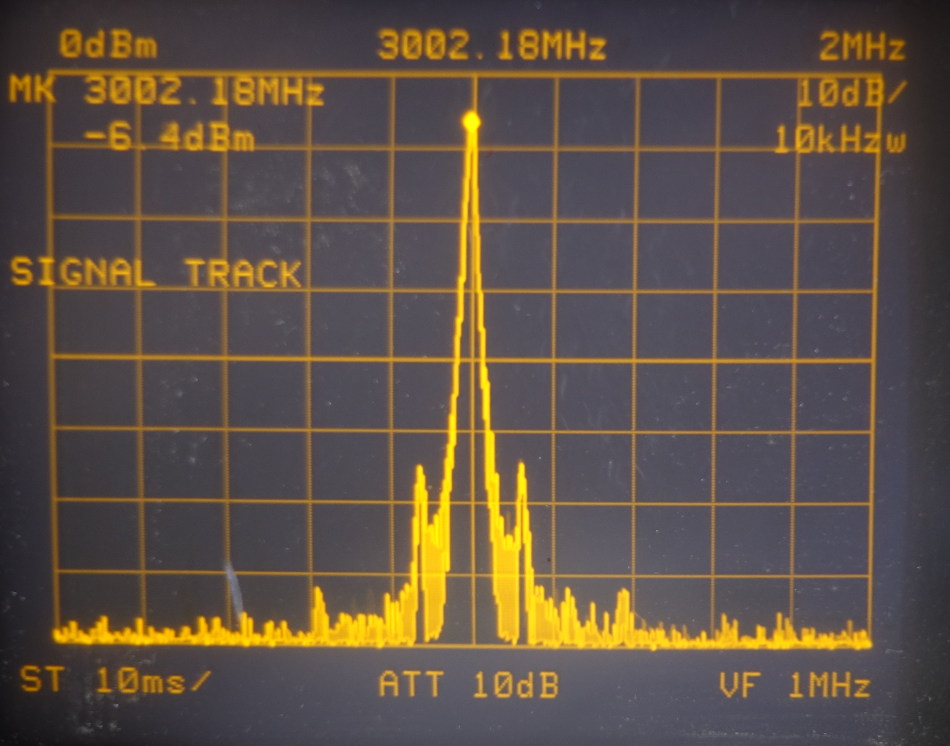
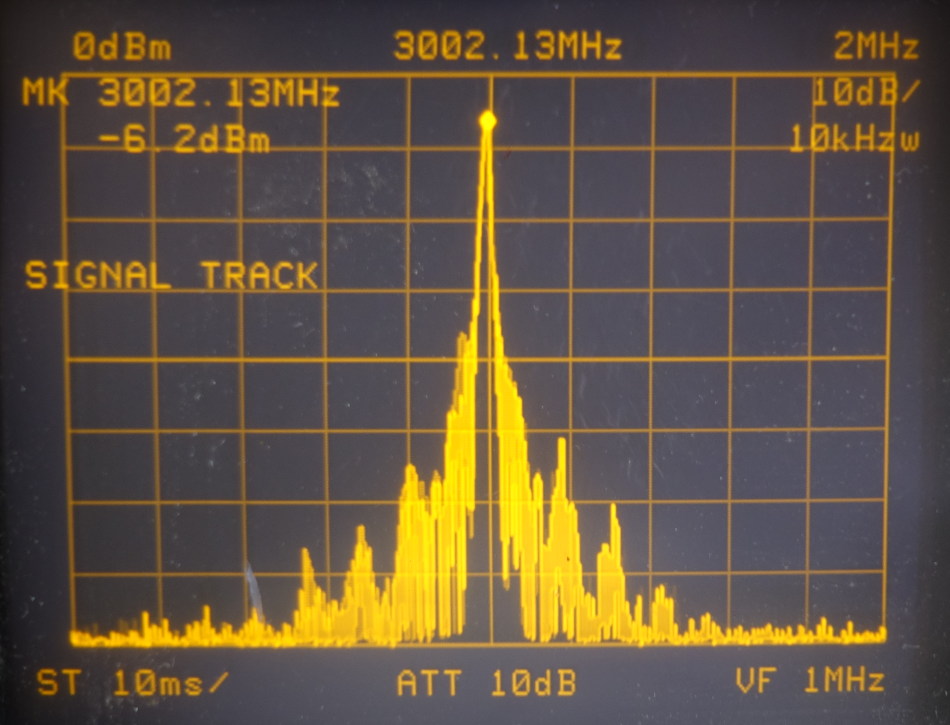
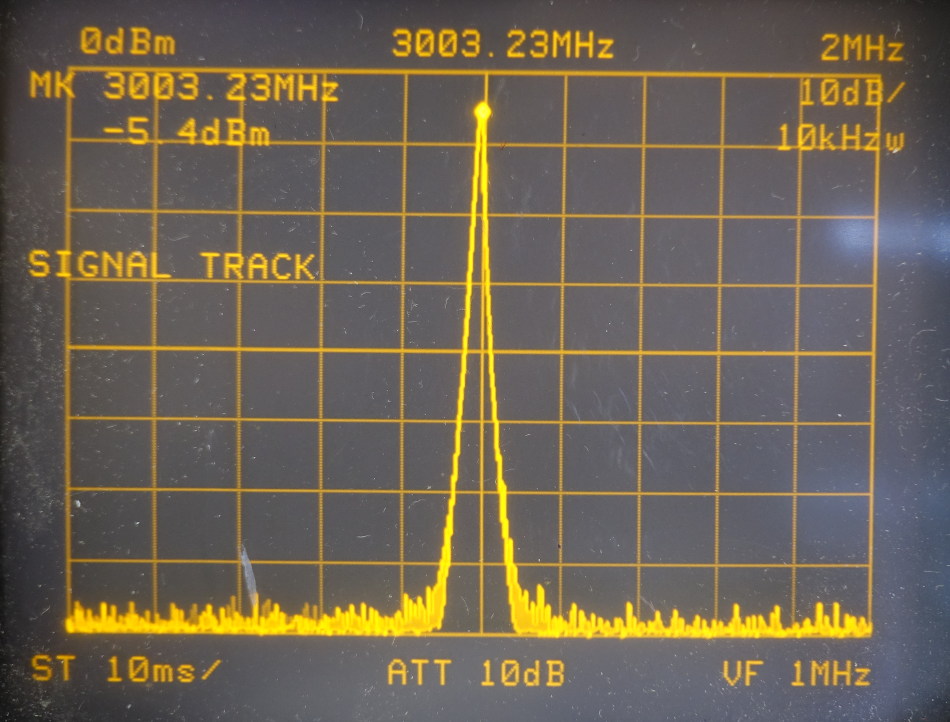
| INT-Mode | FRAC-Mode. | Agilent 8648 zum Vergleich |
Ausgangsleistung des ADF4351 |
| Frequenz |
200 MHz |
400 MHz |
700 MHz |
1 GHz |
2 GHz |
3 GHz |
4 GHz |
| Dämpung bei Output-Off |
>60 dB |
54 dB |
50 dB |
48 dB |
43 dB |
36 dB |
47 dB |
| Die Ausgangsbeschaltung auf der
ADF4351-Platine besteht aus einem 51 Ohm-Widerstand zur
Betriebsspannung und einem Reihen-Keramikkondensator. Das
wird vom Hersteller für breitbandigen Einsatz (und ein
universeller Signalgenerator ist das ja) empfohlen. Dabei soll die differenzielle Ausgangsleistung (also zwischen beiden Ausgangspins) in etwa den programmierten Werten (+5/+2/-1/-4 dBm) entsprechen. Um die kombinierte Leistung beider Pins zu nutzen, müsste man sie aber über ein Hybridkoppler zusammenfassen. Das ist nicht praktikabel, wenn es über ein weites Frequenzband arbeiten soll. Ich nutze also nur einen Ausgang, und schließe den anderen mit einem Dummy-Load ab. Das Diagramm zeigt die an einem Ausgang gemessene Leistung über den nutzbaren Frequenzbereich. Benutzt wurde ein Termokopplermesskopf, der unterhalb von 2,2 GHz auch die durch die Frequenzteilung entstehenden Harmonischen Signale mit-misst. Unterhalb von 2,2 GHz könnten die Messwerte also einen Hauch zu groß sein. Die Ausgangsleistung schwankt ±2dB um den Mittelwert herum, und der Mittelwert liegt 3dB unter dem eingestellten Wert. Der Mittelwert ist an sich ok, da ja das zweite Pin nicht benutzt wird, und somit nur die Hälfte der Leistung verwendet wird, es fehlen also 3dB. Die Schwankung über den Frequenzbereich ist allerdings doppelt so groß, wie vom Hersteller angegeben. |
|
| Man kann aber eine Linearisierung der
Ausgangsleistung erreichen, wenn man ihm einen elektronisch
einstellbaren Abschwächer
mit dem PE43702 nachschaltet. Dessen Ansteuerung kann mit dem selben SPI-Interface erfolgen, das auch den ADF4351 steuert, man benötigt lediglich eine zusätzliche IO-Leitung, die den Ladeimpuls des Schieberegisters erzeugt. Der Betrieb von ADF4351 und PE43702 am gemeinsamen SPI-Interface eines USB4ALL wurde getestet. Die nebenstehende Grafik zeigt die gemessene Grunddämpfung (Einstellung: 0dB) für verschiedene Eingangspegel von 500 MHz bis 4,5 GHz. (Mit +10dBm habe ich nur bis 3,2 GHz gemessen.) Die von mir gemessene Einfügedämpfung des PE42702 änderte sich von 100 MHz bis zu 3 GHz nur um etwa 0,5 dB. Bei höheren Frequenzen hatte ich einige messtechnische Probleme, aber bis 4,5 GHz stellte ich nur ein weiteres halbes dB Dämpfung fest. Das ist für den geplanten Einsatzzweck völlig ausreichend. |
 |
| Dem Leistungsproblem kann man mit einem 20 dB Verstärker begegnen.
Dessen Verstärkung/Gain verringert sich aber im Bereich von
2 bis 4 GHz auch um 5 dB (von 20 auf 15 dB), sein
Frequenzgang ist also noch deutlich schlechter als der des
ADF4351. Auch das muss wieder vom PE43702 ausgeglichen
werden. Die Grafik zeigt die gemessene Verstärkung für verschiedene Eingangsleistungen im Frequenzbereich bis 4,4 GHz. Sie macht auch klar, dass die Eingangsleistung des Verstärkers deutlich unter 0 dBm bleiben muss, um die Sättigung zu vermeiden (rote Linie). Hält man sich daran, dann ist die Verstärkung mit 17dB bei 4,4 GHz besser als vom Datenblatt versprochen. Die maximale Ausgangsleistung, die von der Kette aus ADF4351, PE43702 und Verstärker im gesamten Bereich 2,2 ... 4,4 GHz immer sicher erreicht werden kann, ist +15 dBm. Der Wert auf den sich die Leistung in jedem Falle immer reduzieren lässt ist -20 dBm. |
 |

| input: Freq_Mhz die Sollfrequenz, die erzeugt werden soll Quarz_Mhz die Frequenz des verbauten Quarzes in MHz kann 10 oder 25 sein // zuerst berechnet man RF_DIV (ganzzahlig) // und merkt sich das Zwischenergebnis DIV_SET (ganzzahlig) RF_DIV := round( log2(2200 / Freq_MHz) + 0.5) RF_DIV := MAX( RF_DIV , 0) RF_DIV := MIN( RF_DIV , 8) DIV_SET := RF_DIV RF_DIV := round(power(2, RF_DIV)) // T und D steuern den Frequenzhalbierer und den Verdoppler // sie können 0 oder 1 sein T := 1 D := 0 // nun lege ich einen passenden Wert für R fest, der muss zur Quarzfrequenz passen // wenn ein 25MHz-Quarz verwendet wird dann: R := 100 Quarz_MHz := 25 //wenn aber ein 10MHz-Quarz verwendet wird dann: R := 50 Quarz_MHz := 10 // nun bestimme ich den Anstand zwischen zwei Frequenzen im INT-Mode Step_MHZ := ((1+D)/(R*(1+T))) * Quarz_MHz; // 25->0,02 10->0,005 // und nun folgen die ganzzahligen Parameter INT, MODO und FRAC // dabei wird der Gleitkommawert INT_f ermittelt INT_f := (Freq_Mhz / Step_MHz) * RF_DIV; INT := TRUNC(INT_f); MODO := 4000; FRAC := round( (INT_f - INT) * MODO); // es erfolgt die Bestimmung der wirklich erzielten Ausgangsfrequenz // die kann einen Hauch vom Sollwert abweichen, da die Frequenz in Stufen eingestellt wird // den Wert kann man z.B. auf einem Display anzeigen Fout := Step_MHZ * ( INT + (FRAC / MODO)) * 1000 / RF_DIV; // nun werden die sechs 32-Bit-Werte ermittelt, // die dann per SPI in den Chip geschrieben werden müssen adf[0] := (INT shl 15) or (FRAC shl 3) adf[1] := 1 or (MODO shl 3) or (1 shl 27) adf[2] := 0x0C002E42 or (R shl 14) or (T shl 24) or (D shl 25) adf[3] := 0x00010033 adf[4] := 0x000C8024 or (1 shl 23) or (DIV_SET shl 20) adf[5] := 0x00580005 // falls FRAC zufällig 0 sein sollte, lässt sich noch was optimieren if FRAC=0 then begin adf[2] := adf[2] or (1 shl 8) adf[3] := adf[3] or (1 shl 21) or (1 shl 22) end; // P_SET ist die Ausgangsleistungsstufe von 0=-4dBm; 1=-1dBm; 2=+2dBm; 3=+5dBm; adf[4] := adf[4] or (P_SET shl 3) //fertig, nun können adf[0] ... adf[5] in umgekehrter Reihenfolge den Chip geschrieben werden |
| Ausgang: Auch der Signalausgang muss auf der Frontplatte sein. Hier genügt ein SMA-Anschluss. Dieser sollte ganz links (oder ganz rechts) angeordnet sein. Darunter wäre noch Platz für den Netzschalter. Zum Ausgang gehört eine Taste, mit der sich der Ausgang einfach an- und abschalten lässt. Ob das eine separate Taste ist, oder Teil der Tastatur, ist egal. Damit ergibt sich eine Frontplattenbreite (von links nach rechts) von 3cm (Netzschalter und Ausgang) + 10 cm (Display) + 6,5cm (Tastatur) + 4cm (Rotary Encoder) = 23,5cm. Die Höhe ist mindestens 7 cm. Einigermaßen ästhetisch wird es bei 27cm Breite und 8 cm Höhe. Das nebenstehende Bild zeigt einen ersten Entwurf erstellt mit OpenSCAD und "The Ultimate box maker" von Heartman. Leider ist dieses Gehäuse zu breit, als dass ich es mit meinem 3D-Drucker herstellen könnte. Deshalb habe ich mich dann für ein Würfelförmiges Gehäuse mit einer Kantenlänge von 15 cm entschieden. Dabei liegt nun das Display oberhalb der Tastatur. Rechts der Tastatur ist der Rotary-Encoder und links die HF-Ausgangsbuchse. |
 |
 |
|
4 321.654 987 MHz -2.20 dBm 603 uW INT OFF Pow MHz kHz QCal |
|
4 321.654 987 MHz -2.20 dBm 603 uW INT OFF Frq +dBm -dBm PCal |
|
4 321.654 987 MHz -2.20 dBm 603 uW INT 0 ON Save P+ P- Back |
|
4 321.654 987 MHz -2.20 dBm 603 uW INT 25 000 000 ON Save +MHz -MHz Back |
Autor: sprut
geändert: 24.07.2021
erstellt: 16.02.2019
{kind=link}
{kind=link}